AI Co-design of Morphing Bots
Optimization and control of actuator networks in variable geometry truss systems using genetic algorithms

30 September 2025
By Jianzhe Gu, Ziwen Ye, Tucker Rae-Grant, Shuhong Wang, Ding Zhao, Josiah Hester, Victoria A. Webster-Wood, Lining Yao*.
DOI | Freely access the paper online
News: Berkeley Engineering


A robot’s morphology is pivotal to its functionality, as biological organisms demonstrate through shape adjustments – octopi squeeze through small apertures, and caterpillars use peristaltic transformations to navigate complex environments. While existing robotic systems struggle to achieve precise volumetric transformations, Variable Geometry Trusses offer rich morphing capabilities by coordinating hundreds of actuating beams. However, control complexity scales exponentially with beam count, limiting implementations to trusses with only a handful of beams or to designs where only a subset of beams are actuable.
Here, we introduce a multi-objective optimization framework based on a tailored genetic algorithm to automate actuator grouping, contraction ratios, and actuation timing. We develop a highly damped dynamic simulator that balances computational efficiency with physical accuracy and validate our approach with experimental prototypes. Across multiple tasks, we demonstrate that the metatruss achieves complex shape adaptations with minimal control units. Our results reveal an optimal number of control networks, beyond which additional networks yield diminishing performance gains.
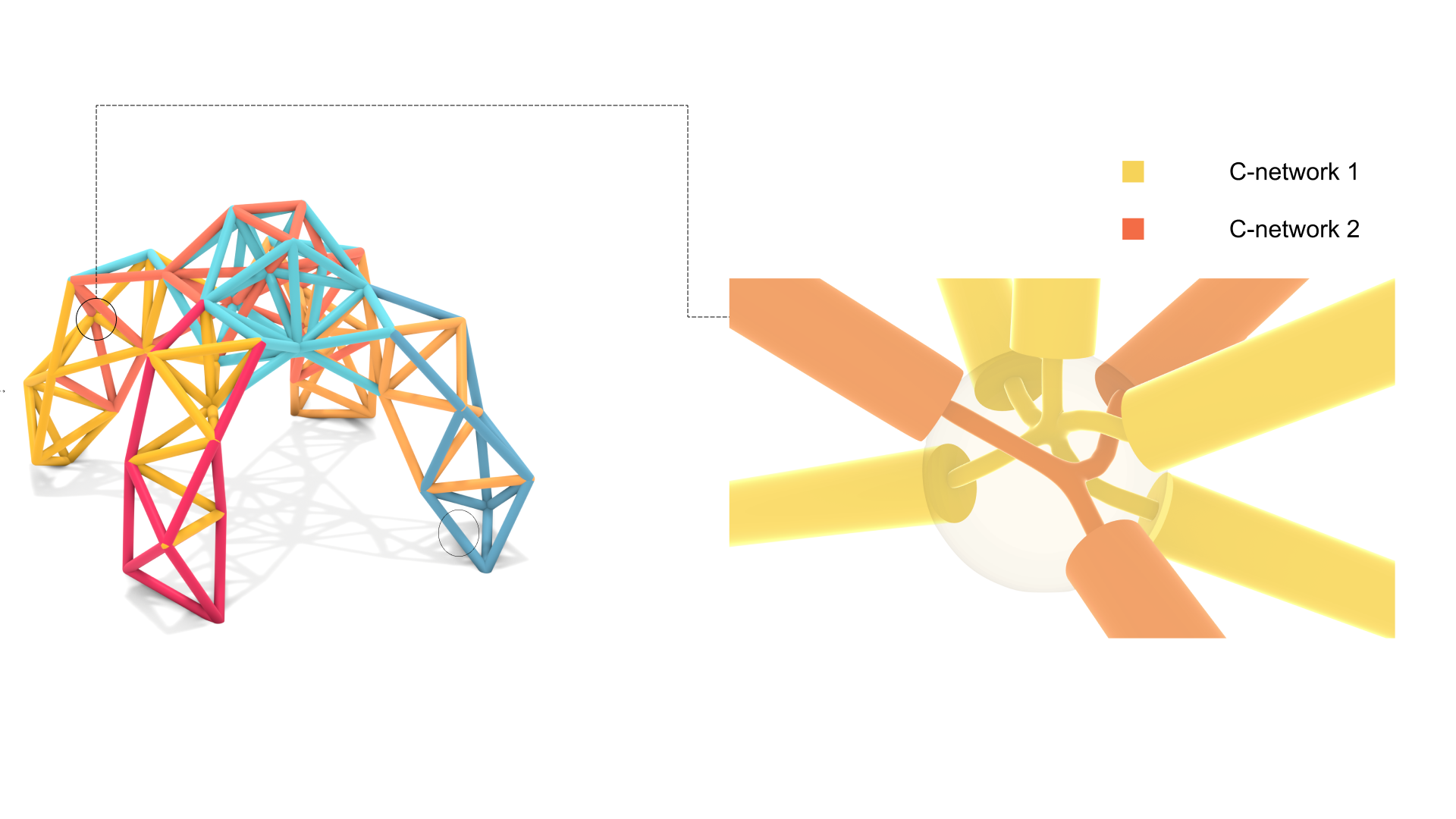
Channel Grouping Concept
A metatruss with double tetrahedron topology consisting of 9 actuators controlled by three inter-connected air channels (C-networks), where actuators in the same C-network expand simultaneously to yield 8 possible configurations through the combinations of binary C-network actuation states.


Channel Grouping Concept
Six-channel quadruped metatruss optimized to achieve four distinct target motions through four open-loop controls: walking, turning, tilting, and crouching.

Genetic Algorithm
The multi-objective genetic algorithm with customized operators used for the metatruss design optimization.
A symmetric metatruss consisting of self-symmetric and inter-symmetric beams. c Preset C-network configurations designating individual C-network as self-symmetric or specify C-network pairs as inter-symmetric.


Network Symmetry
A symmetric metatruss consisting of self-symmetric and inter-symmetric beams.


Performance with Varying C-network Channel Numbers
We investigated the relationship between the number of C-networks and robot performance using a quadruped robot model. The robot was trained to perform four tasks: walking, turning, tilting, and crouching, with C-network numbers ranging from 2 to 64.
These findings support our hypothesis that an optimized C-network design can achieve competitive performance with a relatively small number of C-networks, balancing task performance with control system complexity.


Shape Shifting Helmet
The shape-shifting helmet demonstrated our method’s capability for precise volumetric shape morphing, successfully transforming between two distinct target shapes while maintaining structural integrity. This capability, which is not typically achievable with traditional limbed robots, could enable robotic functionalities from adapting morphology to meet different environmental constraints and functional requirements to precisely approximating different shapes for esthetic purposes.


Morphing Bots
The lobster-inspired robot incorporated energy efficiency alongside locomotion speed, demonstrating improved walking performance and optimization efficiency compared to single-objective optimization. This multi-objective approach extends beyond typical terrain-specific optimizations that focus solely on speed, demonstrating the potential for sustainable locomotion in robots with numerous actuators.
The tentacle-like actuator achieved high precision in reaching multiple 3D target positions, with error rates below 1e−2mm for a 173 mm beam length, demonstrating the method’s capability for precise shape control. This accuracy suggests promising applications in high-precision manipulation tasks using truss robots.


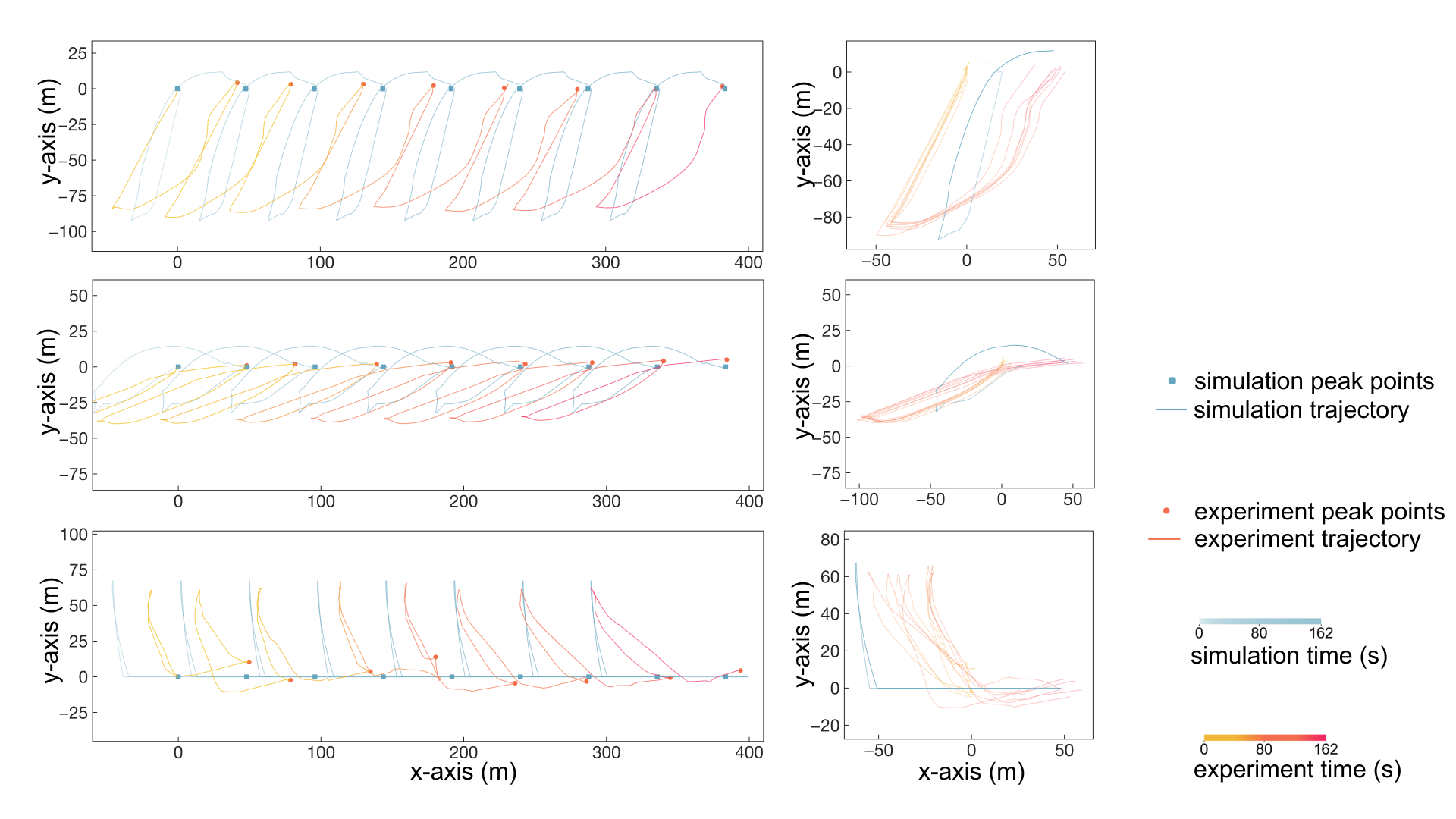
Physical Experiment Validation
To demonstrate the feasibility of our metatruss design and assess the accuracy of our simulator, we constructed and tested a physical prototype called the “pillbug”. This prototype was designed to perform a walking task with a lowered body, optimized for both locomotion speed and minimized average maximum height. The design was selected from the Pareto front after 800 iterations of training and fabricated using previously established methods.

Prototyping Efforts
Design, fabrication files, and assembly instructions can be generated automatically.


Acknowledgment
We thank Sam Kriegman, Tate Johnson, Guanyun Wang, and Yuyu Lin for their insightful suggestions. Research was sponsored by the Army Research Office and was accomplished under Cooperative Agreement Number W911NF-23-2-0138 (LY, VWW, JH). The views and conclusions contained in this document are those of the authors and should not be interpreted as representing the official policies, either expressed or implied, of the Army Research Office or the U.S. Government. The U.S. Government is authorized to reproduce and distribute reprints for Government purposes, notwithstanding any copyright notation herein. The authors also acknowledge support from the National Science Foundation Career Grant IIS2427455 (LY).
Collaborative Institutes
Morphing Matter Lab, UC Berkeley
Carnegie Mellon University
Georgia Institute of Technology