
Fluidic Computation Kit: Towards Electronic-free Shape-changing Interfaces
2022-2023
Although fluidic computation has been utilized to develop interactive devices in the field of Human-Computer Interaction (HCI), the limited computation complexity of previous work hinders the exploration of richer interaction modalities. Based on the Fluidic Computation Kit we developed, this paper explores how unconventional mechanical computing can be leveraged to design shape-changing interfaces that integrate input sensing, output, and complex computation. After introducing the design space enabled by the Kit, we explain how to design four types of elementary computational components and six categories of operators. We end by providing several application scenarios which illustrate the Fluidic Computation Kit’s potential to build sophisticated circuits (e.g., a parallel processor) for use in the field of HCI.
By Qiuyu Lu, Haiqing Xu, Yijie Guo, Joey Yu Wang, Lining Yao
In ACM Conference on Human Factors in Computing Systems (CHI '23) 2023 | DOI | PDF
The Fluidic Computation Kit: Design Space
We introduce the Fluidic Computation Kit that breaks down fluidic computation devices and provides a rich set of building library. Interfaces that have fluidic logic fully analogous to electronic logic with significant complexity can be built with the Kit.
Such fluidic computational interfaces integratesforce input, computation, and tangible output, relying on mechanical structures. We believe such electronic-free interfaces are capable of coupling various kinds of I/O when designing physical and material-based interfaces.

Building interface with embedded mechanical computations enabled by Fluidic Computation Kit.

Design space of fluidic computational interface enabled by our Kit. Human actions can induce forces, which can be converted into air pressures as input for the computational units. Then, the fluidic computational unit generates fluidic-driven output that results in proper responses to the users.
The Fluidic Computation Kit Library: Components
Four types of elementary components are designed. Beyond the switch; the diode, a range of resistors in different values, and capacitors with various functionalities are also introduced.
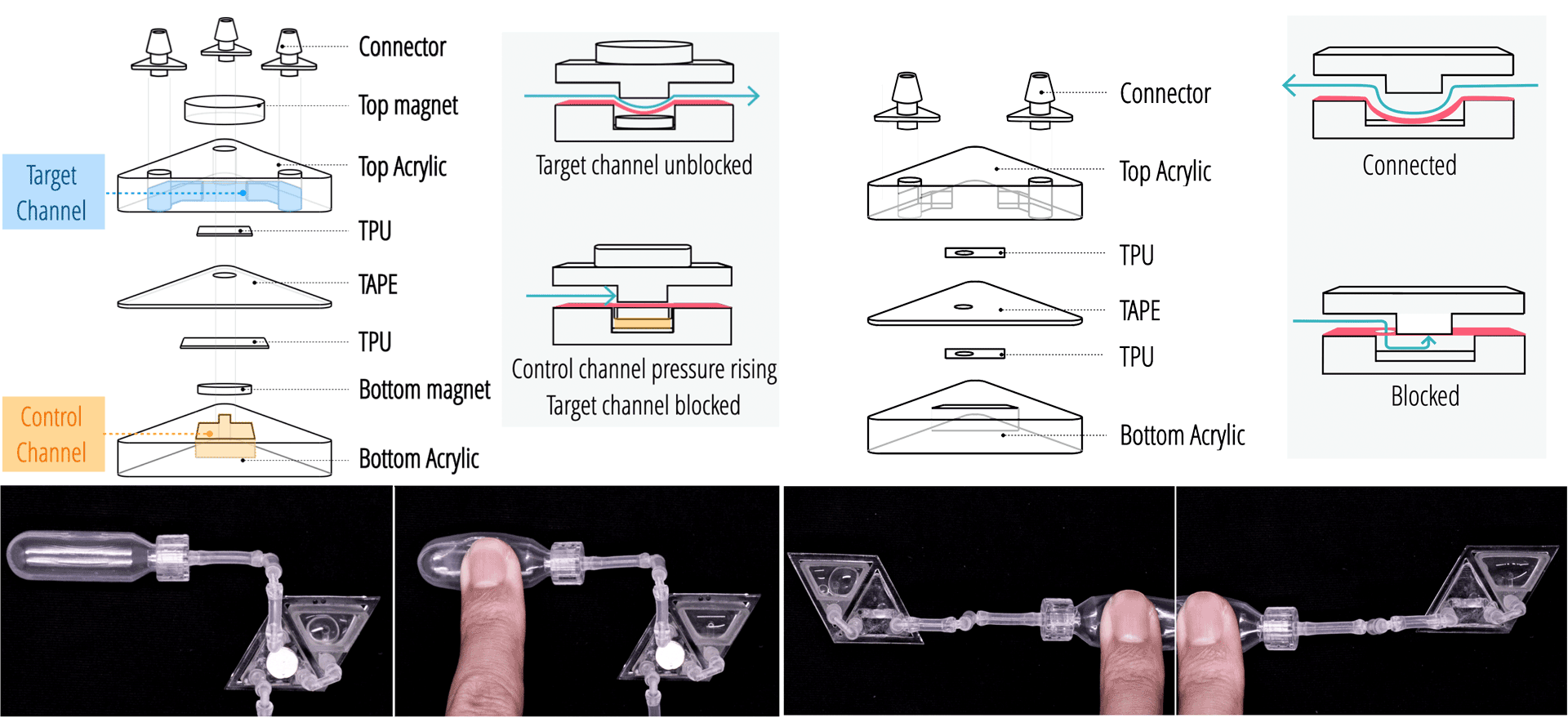
Switch Diode

Capacitor Resistor
The Fluidic Computation Kit Library: Operators
Six categories of computational operators (i.e., logic gates, filter, timer, register, edge detector, and (de)multiplexer) en- abled by simply wiring the aforementioned computational components are explored, including the novel passive filter and timer operator.

Example Circuit and Application: Force Encrypted Passive Latch
Sophisticated interaction systems can be built with our Kit. We designed a force-frequency encrypted “safer lock” that takes force frequency as the input, uses a customized filter to compute and actuates a bendable airbag as the output. The latch can only be opened when the capacitor is pressed at a programmed frequency. This latch can be used in, for example, a medicine drawer that can prevent kids from opening it accidentally.


Example Circuit and Application: Self-contained Passive Wake-Up Alarm
We designed a self-contained wake-up alarm powered by force applied by the user. It takes force duration as the input, uses a customized timer to compute, and outputs haptic and scent feedback to users. When the user takes a nap, a fresh breeze will wake the user with a gentle touch and delightful scent at a 5 minutes mark.


Example Circuit and Application: Posture Detection and Correction Chair
The versatility and reconfigurability of ReCompFig make it ideal for dynamic interaction contexts that put emphasis on the sensory-motor experience, such as virtual or artificial reality. The device shown here can be worn on the user's hand to simulate the weight of an object. Depending on how the cables are configured, the weight attached to the device can shift and swing in different ways to recreate the handfeel of liquids, sheets, and solids.


Example Circuit and Application: Multi-user Rhythm Game
We deployed a multi-user rhythm game with the Kit. The system can take and store inputs from three users, execute parallel computation, and give different outputs accordingly. The game system has three input airbags, a fluidic parallel processor module, and four outputs visualized with three balloons. The computation module is constructed with one edge detector, one NOT gate, two registers, one 1-4 multiplexer, and two diodes. Whenever player A suddenly hits airbag A, the edge-detector will generate a short signal 1. This short signal 1 is then inverted by the NOT gates to a short signal 0. And this short signal 0 is fed to the control input of the successive two registers, enabling the d-latches to receive data while this short signal 0 lasts.
If players B and C hit their airbag within this short time window and hold until the short signal 0 is gone, then bit 1 will be written and stored at d-latches. Otherwise, bit 0 will be written and stored. A successive demultiplexer has its input controls connected to the two registers outputs, and it will decide which one of its four output signals will be 1 based on the stored data by the registers.


Open Source
The project is open source. Four categories of design and fabrication files can be downloaded from the link on the left.
A 9-min long video detailing the design of logic gates and operators is shared below as well.
Downloaded Item List
Components models
DXF files, view with AutoCAD or IllustratorConnector models
STL files
Mold models
DXF files, view with AutoCAD or IllustratorRaw material processing settings
PDF file
Acknowledgment
We want to thank Tianyu Yu for helping conduct the literate review, Hengrong Ni for assisting in the video shooting, and Rhea Chopra for the proofreading. We thank the National Science Foundation Grants (Career IIS2047912 and IIS2017008) for supporting this work.